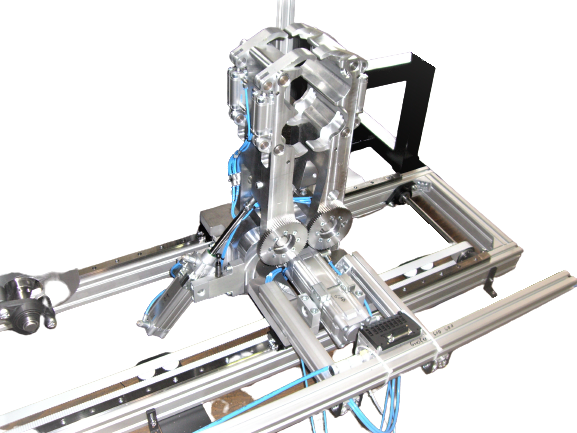
Baukasten Roboterzelle
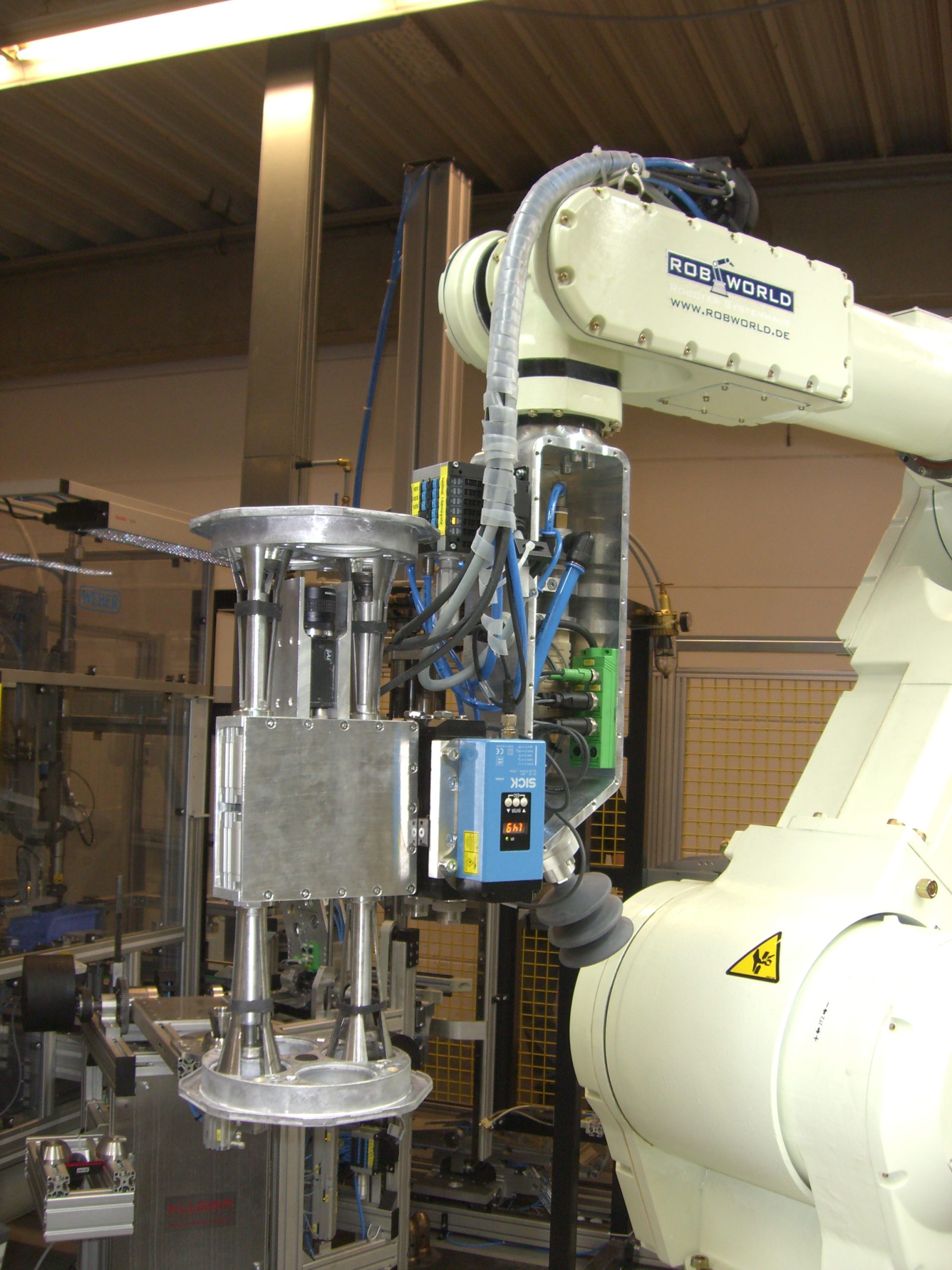
Roboter

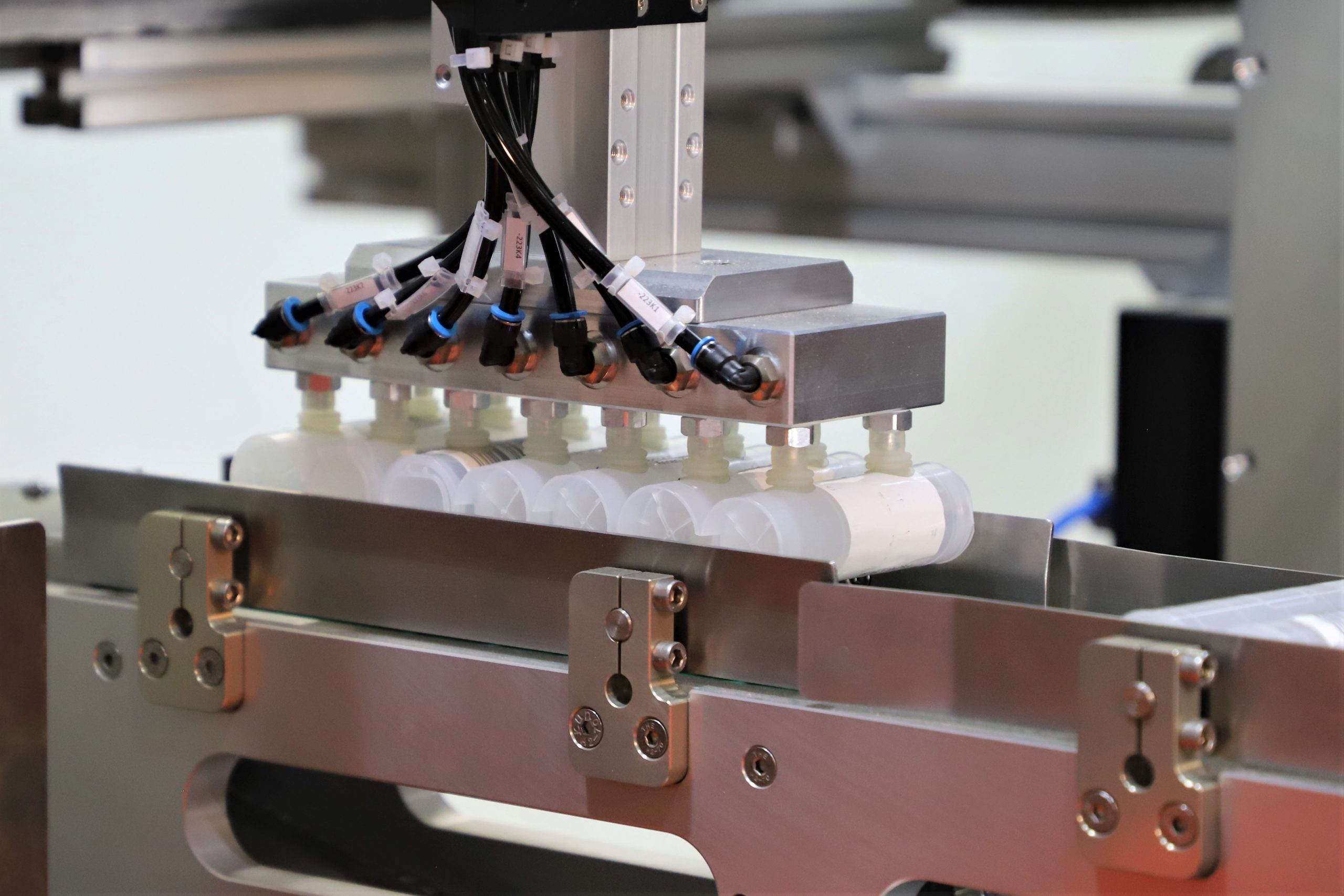
Individuelle Greifsysteme
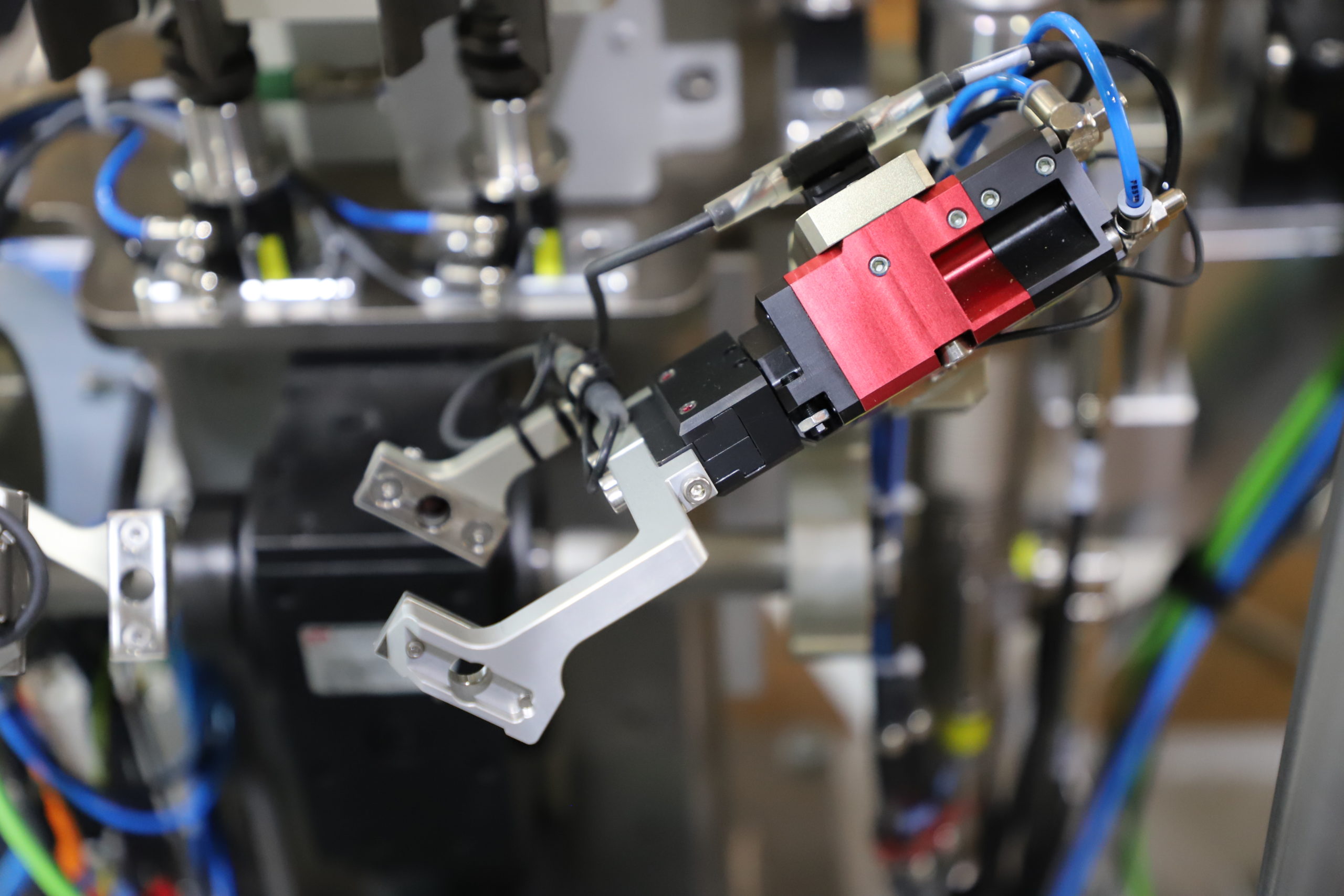






- Mechanische Greifsysteme
- Vakuum-Greifsysteme
- Elektrische Greifsysteme
- Multifunktionsgreifer, usw…
Der Einsatz von Kobots
Die Verwendung von kollaborativen Robotern (Kobots) ist eine der kompromisslosesten Optionen für Unternehmen mit relativ geringen Investitionsvolumen. Diese Option ist jedoch kosteneffektiv und steigert die Produktivität deutlich.
Produktvolumen und Produktvarianten sind möglicherweise die häufigste Methode zur Bestimmung Wann oder wann nicht automatisiert werden soll, die Kapitalrendite und die Hochlaufzeit sind zwei weitere Faktoren.
Es ist schwierig, eine Investition in eine Roboterzelle zu realisieren, wenn das Volumen zu klein ist. Produkte mit mittlerem Volumen werden immer noch von Menschen zusammengebaut.
Kollaborative Roboter oder „Kobots„sind für die direkte Interaktion mit einem menschlichen Arbeiter, der Handhabung einer gemeinsamen Nutzlast und deren Vorteile sind in Bezug auf Ergonomie, Produktivität und Benutzeroberfläche.
PERSPEKTIVE FÜR ROBOTIK IN DER INDUSTRIEPRODUKTION
- Menschen und Roboter teilen sich den Arbeitsbereich
- Präzise, Unterstützend
- Zuverlässiger und Flexibler
- Konstante Qualität
- Wahrnehmung ihrer Umgebung: Intelligent, Sensibel
- sicher und geschützt
Wir bieten unseren Kunden nicht nur Kobots, sondern Automatisierungslösungen für Ihre spezifischen Aufgaben an, um die Effizienz der Produktion durch Zeit- und Kostenersparnis zu steigern !

Arbeitsplatzgestaltung
Es gibt verschiedene Möglichkeiten, den Arbeitsplatz von Menschen und Robotern anzupassen, um die beste Leistung für die Produktion zu erzielen. Einer der möglichen Wege wird nachfolgend demonstriert.


